АНАЛИЗ ЛИНЕЙНОЙ МОДЕЛИ ПОПЕРЕЧНО-УГЛОВЫХ КОЛЕБАНИЙ КОРПУСА ГУСЕНИЧНОЙ ТРАНСПОРТНОЙ МАШИНЫ В УСЛОВИЯХ РЕГУЛЯРНОГО КИНЕМАТИЧЕСКОГО ВОЗБУЖДЕНИЯ
ANALYSIS OF LINEAR MODEL OF TRACK-TYPE TRANSPORT VEHICLE'S BODY CROSS-ANGULAR VIBRATIONS IN REGULAR KINEMATIC EXCITATION CONDITIONS
Скрипниченко Д.А., Ракимжанов Н. Е. (ГОУ ВПО ОТИИ г.Омск, РФ)
Skripnichenko D.A., Rakimzhanov N.E. (ГОУ ВПО ОТИИ Omsk, the Russian Federation)
Составлена и исследована динамическая модель поперечно-углового движения корпуса гусеничной транспортной машины при кинематическом возбуждении, представленном гармонической функцией.
Поведение подрессоренной массы определено при изменении вынужденных частот и диссипативной характеристики подвески.
Результаты позволяют оценить динамические нагрузки в связях навесного оборудования и элементах подвески в исследуемом движении машины.
A dynamical model of cross-angular moving of track-type transport vehicle's body at kinematic excitation, presented by harmonic function, was formed and analyzed.
Behavior of sprung mass at changing of stimulated frequencies and hanger dissipative characteristic was specified.
Results allow to evaluate dynamical loadings in connections of attached implements and hanger's elements in observable vehicle's moving.
Ключевые слова: динамическая модель, коэффициент динамичности, передаточная функция, коэффициент диссипации.
Keywords: dynamic model, dynamic factor, transfer function, dissipation factor.
В работах ![]() определены предельные
скорости движения многоцелевой гусеничной машины в зависимости от параметров
дорожного полотна – амплитуды отклонения полотна от базовой горизонтали и длины
волны профиля по критерию полного использования энергоёмкости подвески,
характеристика которой известна.
определены предельные
скорости движения многоцелевой гусеничной машины в зависимости от параметров
дорожного полотна – амплитуды отклонения полотна от базовой горизонтали и длины
волны профиля по критерию полного использования энергоёмкости подвески,
характеристика которой известна.
В расчётных моделях и полевых испытаниях динамическое поведение машины оценивалось по двум основным обобщенным координатам: линейного движения по вертикали центра масс машины и продольно-углового движения вокруг оси, проходящей горизонтально через центр масс по нормали к траектории его движения. Выбор двух обозначенных обобщенных координат в большинстве случаев оказывается достаточным для оценки динамики транспортной машины и её влияния на экипаж и навесное оборудование, а также расчёта нагруженности основных, несущих элементов подвески, поскольку профили регулярных трасс, как правило, по левой и правой колее одинаковы.
Однако, при движении машины по пересеченной местности общего вида, в пойменных зонах рек под углом к направлению естественной волновой поверхности, поперечно угловое движение машины также будет определяющим, как по своему воздействию на экипаж, так и, в особенности, на связи корпуса с навесным оборудованием и грузом, а также на несущие элементы подвески, поэтому моделирование поперечно-углового движения представляется актуальным.
Использование для моделирования динамического
поведения механической системы функции состояния системы по Лагранжу и,
принимая во внимание, что инерционная характеристика системы является
постоянной и не зависит от обобщённой координаты ![]() поперечного углового
движения, а функция внешнего возбуждения системы является периодической,
уравнение Лагранжа II рода для однокоординатного движения имеет вид:
поперечного углового
движения, а функция внешнего возбуждения системы является периодической,
уравнение Лагранжа II рода для однокоординатного движения имеет вид:
 (1)
(1)
где  , в свою очередь
, в свою очередь ![]() -
диссипативная характеристика амортизаторов
-
диссипативная характеристика амортизаторов  , равная отношению суммарного
усилия
, равная отношению суммарного
усилия ![]() на
штоках амортизаторов к относительной скорости штоков относительно корпусов, а
на
штоках амортизаторов к относительной скорости штоков относительно корпусов, а ![]() - момент
инерции подрессоренной массы в поперечно-угловом движении;
- момент
инерции подрессоренной массы в поперечно-угловом движении;
![]() - квадрат собственной частоты
подрессоренной массы
- квадрат собственной частоты
подрессоренной массы  , в свою очередь
, в свою очередь ![]() - угловая
жёсткость подвески МГМ;
- угловая
жёсткость подвески МГМ;
![]() - амплитудное значение
силовой функции (момента) эквивалентной периодическому с периодом
- амплитудное значение
силовой функции (момента) эквивалентной периодическому с периодом ![]() кинематическому
возбуждению со стороны дорожного полотна.
кинематическому
возбуждению со стороны дорожного полотна.
Характеристическое уравнение, составленное по (1), будет таким:
![]()
а его решение ![]() означает, что при
означает, что при ![]() оба корня
окажутся вещественными и отрицательными. Следуя алгебраическим критериям
Рауса-Гурвица, колебательная система (
оба корня
окажутся вещественными и отрицательными. Следуя алгебраическим критериям
Рауса-Гурвица, колебательная система (![]() ) относится к системам со
значительным демпфированием, её движение будет колебательным, устойчивым со
значительным затуханием.
) относится к системам со
значительным демпфированием, её движение будет колебательным, устойчивым со
значительным затуханием.
Реально, при малом ![]() всегда имеет
всегда имеет ![]() , и движение
подрессоренной массы будет близко к апериодическому около положения
статического равновесия (статической осадки) машины на упругих связях,
последнее обусловлено наличием свободного члена в левой части дифференциального
уравнения (1).
, и движение
подрессоренной массы будет близко к апериодическому около положения
статического равновесия (статической осадки) машины на упругих связях,
последнее обусловлено наличием свободного члена в левой части дифференциального
уравнения (1).
Решение уравнения (1) будет таким ![]() :
:
 (2)
(2)
где![]() - угол, характеризующий
отставание фазы перемещения от фазы внешнего силового момента.
- угол, характеризующий
отставание фазы перемещения от фазы внешнего силового момента.
 (3)
(3)
Если собственная частота ![]() будет больше частоты
будет больше частоты ![]() возбуждения,
то угол
возбуждения,
то угол ![]() будет
положительным и меньшим
будет
положительным и меньшим ![]() , а при
, а при ![]() имеет место
имеет место ![]() Предельный
случай
Предельный
случай ![]() (резонанс)
(резонанс)
![]() и
и
![]()
Демпфирующая способность системы оценивается
коэффициентом ![]() Если система не имеет
демпфера, то
Если система не имеет
демпфера, то ![]() , при значениях
, при значениях ![]() система
характеризуется как имеющая значительное демпфирование.
система
характеризуется как имеющая значительное демпфирование.
В системе со значительным демпфированием свободные колебания быстро затухают или не развиваются вовсе, и амплитуда вынужденных колебаний при гармоническом возбуждении становится стационарной и равной:
 (4)
(4)
Коэффициент динамичности системы ![]() выражающей
отношение динамической и статической амплитуд:
выражающей
отношение динамической и статической амплитуд:
 (5)
(5)
где 
Динамическая жёсткость системы подрессоривания:
 (6)
(6)
Для количественной оценки влияния расчетных
характеристик величин, входящих в состав динамической модели поперечно-углового
движения машины, необходимо обосновать принимаемый в расчётах коэффициент
диссипации ![]() , определяемый как:
, определяемый как:
 (7)
(7)
где ![]() - коэффициент демпфирования
углового движения, который можно выразить через линейную диссипативную
характеристику
- коэффициент демпфирования
углового движения, который можно выразить через линейную диссипативную
характеристику ![]() амортизатора, условно расположенного
вертикально и создающего силовую реакцию
амортизатора, условно расположенного
вертикально и создающего силовую реакцию ![]() с плечом
с плечом ![]() относительно центра
масс на корпус машины, т.е.:
относительно центра
масс на корпус машины, т.е.:
 (8)
(8)
![]() - ширина колеи,
конструкторский размер.
- ширина колеи,
конструкторский размер.
По данным завода изготовителя и при натурных силовых
испытаниях реального амортизатора, бывшего в эксплуатации, отмечен значительный
разброс значений диссипативной характеристики ![]() здесь и в (8)
здесь и в (8) ![]() - скорость
относительного движения штока линейного гидравлического амортизатора по
отношению к его корпусу. Так, при скорости
- скорость
относительного движения штока линейного гидравлического амортизатора по
отношению к его корпусу. Так, при скорости ![]() сила сопротивления
сила сопротивления ![]() прямого
хода имела значение у нового амортизатора до 10000
прямого
хода имела значение у нового амортизатора до 10000![]() и при дальнейшем увеличении
и при дальнейшем увеличении ![]() реакция
реакция ![]() возрастала
линейно, т.е. максимальное значение
возрастала
линейно, т.е. максимальное значение ![]() при моделировании можно
принять
при моделировании можно
принять ![]() .
У некоторых, бывших в эксплуатации амортизаторов, силовая реакция
.
У некоторых, бывших в эксплуатации амортизаторов, силовая реакция ![]() была на порядок
меньше, т.е. минимальное расчётное значение может быть
была на порядок
меньше, т.е. минимальное расчётное значение может быть ![]()
Реально, в движении машины относительная скорость
движения штока амортизатора будет переменной, зависимой от скорости
кинематического возбуждения опорного катка, снабжённого амортизатором и
переменной передаточной функции угловой скорости ![]() механизма преобразования
движения от рычага балансира до оси штока амортизатора. В работе
механизма преобразования
движения от рычага балансира до оси штока амортизатора. В работе ![]() передаточная
функция получена в виде:
передаточная
функция получена в виде:
 (9)
(9)
где ![]() - постоянный известный
кинематический размер балансира;
- постоянный известный
кинематический размер балансира;
![]() - переменная длина
амортизатора;
- переменная длина
амортизатора;
![]() - переменный угол между
осями балансира и амортизатора.
- переменный угол между
осями балансира и амортизатора.
Передаточная функция ![]() будет вполне определённой
при использовании дополнительно двух уравнений связи параметров механизма
подвески, первое из них (рисунок 1):
будет вполне определённой
при использовании дополнительно двух уравнений связи параметров механизма
подвески, первое из них (рисунок 1):
![]() (10)
(10)
где![]() - известный размер стойки
(расстояние от оси балансира до точки крепления амортизатора на корпусе машины);
- известный размер стойки
(расстояние от оси балансира до точки крепления амортизатора на корпусе машины);
![]() - угол, определяющий
положение рычага балансира второе уравнение связи:
- угол, определяющий
положение рычага балансира второе уравнение связи:
 причём
причём ![]() (11)
(11)
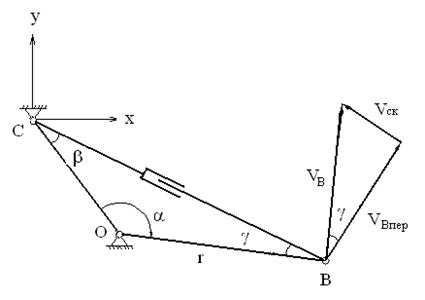
Рисунок 1 – Механизм подвески и геометро-аналитические соотношения
при разложении движения
где ![]() - размер стойки,
- размер стойки, ![]() - длина
опорного рычага,
- длина
опорного рычага,
![]() - переменный размер амортизатора
(кулисы),
- переменный размер амортизатора
(кулисы),
![]() ,
, ![]() ,
, ![]() - скорости
подвижной точки крепления амортизатора: абсолютная, переносная, относительная
соответственно.
- скорости
подвижной точки крепления амортизатора: абсолютная, переносная, относительная
соответственно.
Поскольку ![]() а
а ![]() - исполняет роль
обобщённой координаты механизма подвески, т.е. задавая
- исполняет роль
обобщённой координаты механизма подвески, т.е. задавая ![]() , можно вычислить
, можно вычислить ![]() , затем
угол
, затем
угол ![]() и,
как следствие,
и,
как следствие, ![]() .
.
Нашими исследованиями ![]() показано, что в пределах
динамического хода катка передаточная функция
показано, что в пределах
динамического хода катка передаточная функция ![]() подвески базового изделия имеет
практически постоянное значение
подвески базового изделия имеет
практически постоянное значение ![]() , поэтому выражение
относительной скорости
, поэтому выражение
относительной скорости ![]() будет достаточно простым:
будет достаточно простым:
 (12)
(12)
Оставаясь в рамках линейной модели поперечно-углового
движения машины, диссипативную характеристику будем считать независимой от
параметров этого движения и постоянной в точном соответствии с зависимостью (8),
при этом численное значение ![]() выберем из диапазона
выберем из диапазона ![]()
Однако, более точный расчёт значения ![]() по (8) должен
учитывать геометрическое расположение оси гидравлического амортизатора,
поскольку в компоновке механизма подвески эта ось образует с вертикалью
значительный угол
по (8) должен
учитывать геометрическое расположение оси гидравлического амортизатора,
поскольку в компоновке механизма подвески эта ось образует с вертикалью
значительный угол ![]() , достигающий при полной
выборке динамического хода катка значения
, достигающий при полной
выборке динамического хода катка значения ![]() , и, следовательно, только
часть силовой продольной реакции
, и, следовательно, только
часть силовой продольной реакции ![]() амортизатора уходит на
создание силового момента
амортизатора уходит на
создание силового момента ![]() на корпус машины, а именно:
на корпус машины, а именно:
![]() ,
,
тогда
 .
.
Приняв
среднее значение ![]()
![]() , получим:
, получим:
![]()
![]()
Коэффициент диссипации ![]() амортизатора будет иметь
значение в диапазоне:
амортизатора будет иметь
значение в диапазоне:
Учитывая, что на каждом борту установлены параллельно
по три амортизатора, диапазон изменения ![]() в дифференциальном уравнении
(1) поперечно-углового движения корпуса машины будет
в дифференциальном уравнении
(1) поперечно-углового движения корпуса машины будет ![]()
Достаточно полное представление о динамических
характеристиках системы даёт коэффициент динамичности ![]() , рассчитанный по
вариациям параметров системы и внешнего силового возмущения в диапазонах их
изменения.
, рассчитанный по
вариациям параметров системы и внешнего силового возмущения в диапазонах их
изменения.
На рисунке 2 приведены результаты расчета по (5) ![]() системы,
имеющей параметры:
системы,
имеющей параметры: ![]()
![]()
![]()
![]() и
и ![]()
![]()
![]()
![]()
Как видно из рисунка 2, наибольшую амплитуду колебаний
подрессоренной массы вызывают частоты ![]() кинематического возбуждения,
близкие к собственной частоте
кинематического возбуждения,
близкие к собственной частоте ![]() системы и при отсутствии
диссипации
системы и при отсутствии
диссипации ![]() и
и ![]() система входит в
резонансный режим с неограниченным возрастанием динамической амплитуды.
система входит в
резонансный режим с неограниченным возрастанием динамической амплитуды.
С учётом диссипации колебания ограничены во всём
диапазоне частот возбуждения и при ![]() , т.е. при
, т.е. при ![]() демпфирование
является значительным и динамическая амплитуда на резонансном режиме только в
два раза больше статической. Такое демпфирование вполне технически реализуемо в
подвеске исследуемого объекта.
демпфирование
является значительным и динамическая амплитуда на резонансном режиме только в
два раза больше статической. Такое демпфирование вполне технически реализуемо в
подвеске исследуемого объекта.
Просчитав значение ![]() по вариациям параметров
системы и силового возбуждения, получим массивы значений динамических амплитуд
по вариациям параметров
системы и силового возбуждения, получим массивы значений динамических амплитуд ![]() поперечно-углового
движения и, как следствие, угловых ускорений подрессоренной массы в таком
движении. Угловые ускорения дают исходную информацию о динамических нагрузках в
связях элементов подвески и узлах крепления навесного оборудования и
перевозимых грузов.
поперечно-углового
движения и, как следствие, угловых ускорений подрессоренной массы в таком
движении. Угловые ускорения дают исходную информацию о динамических нагрузках в
связях элементов подвески и узлах крепления навесного оборудования и
перевозимых грузов.
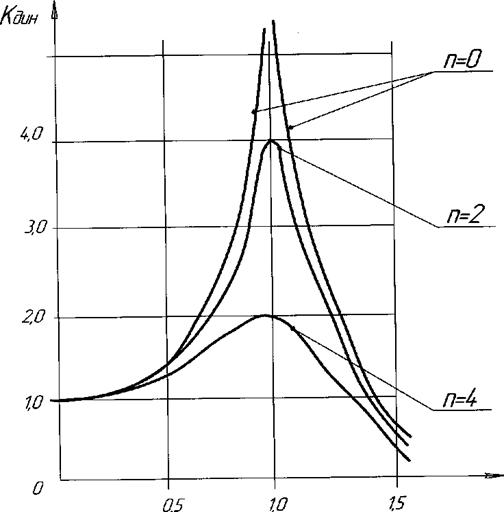
Рисунок 2 – Значения коэффициента динамичности исследуемой системы в зависимости от частоты возбуждения и диссипативных свойств
Краткие выводы
1. Знание характеристик поперечно-углового колебательного процесса является востребованным для расчёта предельных эксплутационных скоростей движения машины, расчёта нагрузок на узлы крепления любого навесного оборудования и на элементы подвески.
2.
Расчёты коэффициента
динамичности ![]() системы показали, что
система подрессоривания МГМ с гидравлическими амортизаторами обладает
значительной диссипацией даже без учёта влияния гусеничного обвода и конструкционного
демпфирования в связях, что обеспечивает быстрое затухание собственных
колебаний подрессоренной массы и ограничивает на безопасном уровне динамические
амплитуды поперечно-углового движения.
системы показали, что
система подрессоривания МГМ с гидравлическими амортизаторами обладает
значительной диссипацией даже без учёта влияния гусеничного обвода и конструкционного
демпфирования в связях, что обеспечивает быстрое затухание собственных
колебаний подрессоренной массы и ограничивает на безопасном уровне динамические
амплитуды поперечно-углового движения.
3. Оценку влияния диссипативных свойств гусеничного обвода целесообразно провести на основе эксперимента с последующим вводом определённых экспериментально диссипативных характеристик в динамическую модель, при этом, тем не менее, можно полагать, что динамическое поведение подрессоренной массы в поперечно-угловом движении будет близко к статическому.
Список использованных источников
1. Балакин П.Д., Кузнецов Э.А., Денисенко В.И., Князькин О.Н. Предельные скорости движения многоцелевой гусеничной машины в условиях естественных трасс по критерию энергоёмкости подвески. Материалы научно-технической конференции «Броня-2006». Многоцелевые гусеничные и колесные машины: разработки, производство, модернизация и эксплуатация. -Омск, 2006. -С.64-68.
2. Балакин П.Д., Кузнецов Э.А, Денисенко В.И., Алферов С.В., Князькин О.Н. Предельные режимы движения многоцелевой гусеничной машины по критерию полного использования энергоёмкости подвески// Омский научный вестник. - 2006. - № 7. - С.96-98.
3. Балакин П.Д., Кузнецов Э.А., Денисенко В.И., Алферов С.В., Князькин О.Н. Экспериментальное определение предельных по пробою подвески скоростей движения МГМ в условиях естественных трасс// Омский научный вестник.- 2007.- №1(52).- С.37-51.
4. Бабаков И.М. Теория колебаний. -М: Наука, 1968. -517 с.
5. Балакин П.Д., Кузнецов Э.А., Алфёров С.В., Лобов В.А., Прозоров П.А. Инерционное нагружение элементов гидравлического амортизатора в подвеске транспортных машин // Омский научный вестник.- 2007.- № 1 (52).- С.42-47.