ПОВЕДЕНИЕ ЧАСТИЦЫ ГАЛТОВОЧНОГО НАПОЛНИТЕЛЯ ПРИ МАГНИТНОЙ ГАЛТОВКЕ
Чернов Л.К. (ИГЭУ, г.Иваново, РФ)
Magnetic tumbling - the kind superfinishing machining. Cutting tool is tumbling ferrimagnetic filler, a means of power transmission from the motor shaft to the work surface is a magnetic field induced by permanent magnets. In this paper, the behavior of particles of filler tumbling by magnetic floor.
Магнитная галтовка – вид суперфинишной обработки резанием. Режущим инструментом является ферромагнитный галтовочный наполнитель, средством передачи усилия с вала двигателя на обрабатываемую поверхность является магнитное поле, индуцируемое постоянными магнитами. Обработка происходит в неподвижном рабочем объеме, в который загружены: наполнитель, представляющий из себя короткие обоюдоострые иглы, обрабатываемые детали и смазочно-охлаждающая жидкость. Полирование деталей происходит за счет соударения перемещаемого магнитным полем наполнителя и обрабатываемых деталей. Магнитное поле в качестве средства передачи обрабатывающего усилия позволяет управлять потоком наполнителя, так как он движется в соответствии с конфигурацией магнитного поля, индуцируемого постоянными магнитами.
Простейшее устройство для магнитной галтовки изображено на рис. 1:
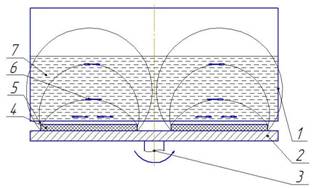
Рисунок 1 - Установка для магнитной галтовки: 1 - рабочий объем; 2 – подвижный диск; 3 – передающий вал; 4 – постоянный магнит;5 – магнитное поле; 6 – галтовочный наполнитель; 7 – смазочно-охладительная среда
Устройство состоит из двигателя, вращающего подвижный диск с закрепленными на нем постоянными магнитами и неподвижным рабочим объемом, в котором происходит магнитное галтование.
В классическом методе галтования частицы наполнителя беспорядочно воздействуют с обрабатываемой поверхностью и друг другом, за счет вращения рабочего объема. В отличие от него, в магнитной галтовке рабочий объем неподвижен. Перемещение частиц наполнителя, создается за счет вращения управляющего магнитного поля и зависит от его конфигурации. Движение частиц в рабочем объеме упорядочивается магнитным полем и управляется им, и следовательно, при изменении конфигурации магнитного поля меняется и траектория как отдельной частицы, так и всего облака наполнителя в целом. Следовательно можно подобрать такую конфигурацию поля, при котором совокупное облако наполнителя будет наиболее эффективно обрабатывать поверхность обрабатываемой детали. Для этого необходимо изучить поведение отдельной частицы на простейшем примере управляемого поля, для того что бы знать, как себя ведет частица в тех или иных условиях. Известно, что чем сложнее траектория частицы, тем эффективней обрабатывается сложные поверхности, так же известно, что чем больше неоднородность индукции поля, тем больше сила воздействия на частицу со стороны постоянных магнитов.
Рассмотрим поведение частиц наполнителя в управляющем рабочем поле представленном на рис 2. Рабочее поле индуцируется двумя группами магнитов – основной и вспомогательной. Сила всех магнитов равна 500 кА/м. Основная группа вращается по часовой стрелке, вспомогательная – против.
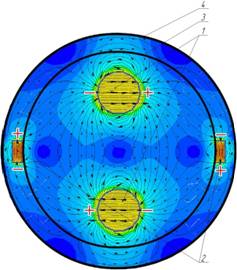
Рисунок 2 -Схема управляющего поля:
1 – основная группа постоянных магнитов; 2 – вспомогательная группа постоянных магнитов; 3 – граница рабочей области; 4 – условный нулевой потенциал
На частицу
наполнителя управляющее магнитное поле воздействует с силой ![]() , эта сила всегда направлена в сторону
большей индукции магнитного поля, то есть в сторону постоянного магнита. Эта
сила передвигает частицу вслед за перемещающимся магнитом. Если предположить,
что на частицу более не действует никаких сил, то траектория частицы совпадает
с перемещением магнита.
, эта сила всегда направлена в сторону
большей индукции магнитного поля, то есть в сторону постоянного магнита. Эта
сила передвигает частицу вслед за перемещающимся магнитом. Если предположить,
что на частицу более не действует никаких сил, то траектория частицы совпадает
с перемещением магнита.
На рис. 3 изображена схема, иллюстрирующая данную гипотетическую ситуацию.

Рисунок 3- Схема перемещение магнита и частицы наполнителя:
1 - постоянный магнит; 2 – частица наполнителя; 3 – «след» перемещения магнита; 4 – траектория частицы; 5 – граница рабочей области
Из рис. 3 видно,
что частица перемещается по окружности. Причем скорость ее равномерна и
совпадает со скоростью магнита. Если учитывать комплекс всех сил, воздействующих
на частицу, то характер движения частицы в той же схеме изменится. Перемещающая
частицу сила ![]() будет частично компенсироваться силой
трения, возникающей между дном рабочей области и частицей, а так же силой
сопротивления среды. При воздействии одного постоянного магнита,
перемещающегося под рабочим объемом, частица будет вести себя следующим образом
(рис. 4):
будет частично компенсироваться силой
трения, возникающей между дном рабочей области и частицей, а так же силой
сопротивления среды. При воздействии одного постоянного магнита,
перемещающегося под рабочим объемом, частица будет вести себя следующим образом
(рис. 4):
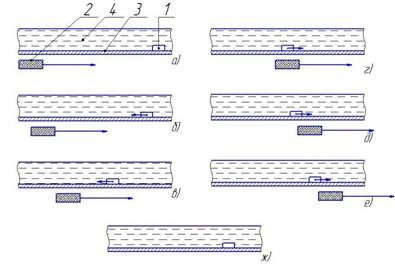
Рисунок 4- Поведение частицы при проходе магнита:
1- частица; 2 - постоянный магнит; 3 – дно рабочей области; 4 – СОЖ
При достаточном
расстоянии до постоянного магнита частица лежит неподвижно (рис. 4, а)), как
только магнит приближается на расстояние, при котором модуль ![]() становится больше суммы сил трения и
сопротивления среды, частица начинает передвигаться в сторону постоянного
магнита (рис. 4, б)). По мере сближения магнита и частицы
становится больше суммы сил трения и
сопротивления среды, частица начинает передвигаться в сторону постоянного
магнита (рис. 4, б)). По мере сближения магнита и частицы ![]() растет, так как известно что величина
растет, так как известно что величина ![]() обратно пропорциональна четвертой степени
расстояния между частицей и магнитом (рис. 4, в)). Некоторое определенное
время частица перемещается вслед за постоянным магнитом (рис. 4, г)), но по
мере движения частица тормозится под действием внешних факторов (рис. 4,
позиция д)), по мере компенсирования
обратно пропорциональна четвертой степени
расстояния между частицей и магнитом (рис. 4, в)). Некоторое определенное
время частица перемещается вслед за постоянным магнитом (рис. 4, г)), но по
мере движения частица тормозится под действием внешних факторов (рис. 4,
позиция д)), по мере компенсирования ![]() частица все более отстает от
постоянного магнита(рис. 4, позиция е)), вплоть до полной остановки (рис. 4,
позиция ж)).
частица все более отстает от
постоянного магнита(рис. 4, позиция е)), вплоть до полной остановки (рис. 4,
позиция ж)).
При присутствии
в системе двух или более количества постоянных магнитов частица ведет себя
совершенно по-другому, нежели в описанном выше случае. В принципе, описанное
выше прерывистое движение частицы сохраняется, но при движении двух магнитов
возникает ситуация, когда полюса постоянного магнита и частицы наполнителя, представляющие
собой диполь, могут быть и сонаправлены и разнонаправлены. Соответственно меняется
и направление вектора силы ![]() . При смене направления вектора, сила
. При смене направления вектора, сила ![]() подбрасывает частицу в рабочем объеме и
частица совершает своеобразный «прыжок» при этом, стремясь восстановить
направленность полюсов, поворачивается вокруг своей оси (рис 5).
подбрасывает частицу в рабочем объеме и
частица совершает своеобразный «прыжок» при этом, стремясь восстановить
направленность полюсов, поворачивается вокруг своей оси (рис 5).
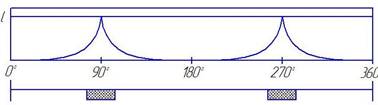
Рисунок 5 -
Схема траектории движения частицы при цикличной смене направления вектора ![]()
При вводе в систему вспомогательной группы постоянных магнитов к описанным выше движениям частицы наполнителя добавляется третье, в целом идентичное второму, показанному на Рис. 5, но происходящее в плоскости, параллельной дну рабочего объема (Рис. 6), а не его стенке – как в случае со вторым типом движения.

Рисунок 6 - Влияние вспомогательной группы постоянных магнитов на частицу наполнителя:
1 – траектория частицы; 2 – траектория основных постоянных магнитов; 2 - траектория вспомогательных магнитов
Траектория перемещения частицы галтовочного наполнителя по рабочему объему магнитной галтовки складывается из трех происходящих одновременно типов движения указанных выше. Траектория частицы сложна, но знать ее необходимо для того, что бы управлять облаком наполнителя при магнитной галтовке для эффективного галтования всех типов сложных и фасонных поверхностей.