МЕТОДИКА ИЗУЧЕНИЯ СТУДЕНТАМИ СТРОИТЕЛЬНЫХ СПЕЦИАЛЬНОСТЕЙ МАТРИЧНЫХ АЛГОРИТМОВ В ЭЛЕКТИВНОМ КУРСЕ «ДИНАМИКА И УСТОЙЧИВОСТЬ СООРУЖЕНИЙ»
Сенющенков М.А., Швачко С.Н. (БГИТА, г.Брянск, РФ)
Описана структура спецкурса строительной механики “Динамика и устойчивость сооружений” и методика практического применения на лабораторных занятиях обширного программного обеспечения, наиболее подходящая для изучения матричных алгоритмов.
С 2008 года в БГИТА введены для студентов строительных специальностей ПГС и ГСХ на 4-м курсе 2 элективных семестровых спецкурса с закреплением материала каждого семестра двумя РПР и зачетом:
1) “Динамика и устойчивость сооружений” в объеме 54 часов аудиторных занятий (лекций, практических и лабораторных) [4];
2) “Численные методы решения задач строительной механики” в объеме 48 часов аудиторных занятий (лекций, практических и лабораторных).
К отдельным темам спецкурсов удобно обращаться при изучении специальных дисциплин на старших курсах (САПР несущих конструкций, металлические конструкции, искусственные дорожные сооружения и другие).
В спецкурсе “Динамика и устойчивость сооружений” нами сделан акцент на теоретическое изучение и понимание таких сложных явлений механики, как устойчивость и динамика, а также на практическое освоение матричных алгоритмов получения результатов расчета из исходных данных сооружений. Методические материалы [4-9] включают примеры выполнения двух РПР, контрольные вопросы к изучаемым темам, справочные таблицы специальных функций для расчета рам на устойчивость, а также таблицы систематизации курсов устойчивости и линейной динамики [4].
Цель РПР №1 "Расчет плоской статически неопределимой рамы с центрально сжатыми стойками на устойчивость методом перемещений" [5,6] - освоение и закрепление методов расчета стержневой системы на устойчивость.
Методический прием освоения студентами курса устойчивости сооружений при выполнении РПР состоит в том, что операции подготовки исходных данных и выполнения основных расчетов на устойчивость статически неопределимой рамы выполняются вручную. Применение на лабораторных занятиях пакета MathCAD позволяет автоматизировать вычисление специальных функций [4, 5], определителя устойчивости 2-го порядка в графической форме и уточнение корней критического параметра устойчивости [6].
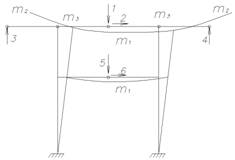
Важное значение при усвоении материала имеет графическое представление двух форм потери устойчивости плоской рамы. Важно также знать конечную цель расчета – это проверка устойчивости стоек рамы по СНиП [10] по значению сжимающей силы и величине расчетной (приведенной) длины стойки.
На лабораторных занятиях предусмотрено также применение лицензионного отраслевого пакета конечно-элементного анализа Stark_ES для автоматизированного расчета рамы на устойчивость по деформированной схеме и сравнение результатов с ручным расчетом для контроля.
Цель РПР №2 "Динамический расчет многомассовой стержневой системы на собственные и вынужденные колебания" [7-9] - освоение и закрепление методов и алгоритмов расчета сооружений на собственные и вынужденные колебания на примере плоской рамы.
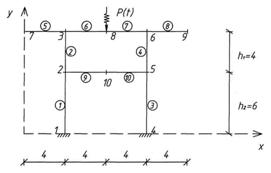
Методический прием освоения студентами курса динамики при выполнении РПР состоит в том, что все операции подготовки исходных данных и выполнения расчетов расчленены на промежуточные этапы с контролем результатов преподавателем. Максимальное число динамических степеней свободы не превышает семи, что позволяет часть расчетов выполнить вручную (формирование матрицы податливости, вектора внешних нагрузок и матрицы масс).
Применение ЭВМ ограничено сложными разделами: расчетами статически неопределимой рамы, обращением матрицы податливости, вычислением собственных значений и собственных векторов, расчетом на вынужденные колебания. Важное значение при усвоении материала имеет графическое представление спектров частот и периодов колебаний, а главное - графическое представление и анализ форм собственных колебаний плоской рамы.
Приведено два контрольных примера выполнения РПР: 1-й пример представлен в форме тестовой задачи с тремя степенями свободы и ручными аналитическими расчетами; 2-й пример представлен в форме прикладной задачи с 6-ю степенями свободы и автоматизированными статическими и динамическими расчетами.
На лабораторных занятиях предусмотрено два сценария выполнения РПР с различным набором программного обеспечения, представленных ниже в таблице.
Промышленные пакеты программ автоматизированного выполнения расчетов сооружений на устойчивость и колебания (SCAD, STARK, NASTRAN и др.) рекомендуем применять студентам для сравнительного контроля РПР на лабораторных занятиях и при решении более простых тестовых задач. Практическое освоение расчетов сооружений по нормам [11, 12] более целесообразно проводить в курсах САПР и на дипломном проектировании.
|
Алгоритмы расчета |
Програм. обеспечение |
|||
|
№ |
Наименование этапа |
Матричная запись |
Сценарий 1 |
Сценарий 2 |
|
1 |
Подготовка исходных данных и выполнение статических расчетов |
|||
|
1.1 |
Установить число динамических степеней свободы "n" и сформировать динамическую модель рамы (аналитически и графически)
|
|
||
|
1.2 |
Сформировать вектор динамических нагрузок |
|
Вручную |
|
|
1.3 |
Сформировать вектор масс |
|
Вручную |
|
|
1.4 |
Сформировать дискретную систему для плоской рамы с номерами узлов, стержней, динамической нагрузкой, закреплениями, осями координат и размерами (аналитически и графически) |
|
||
|
1.5 |
Сформировать таблицы исходных данных по узлам, стержням, сечениям и узловым силам |
|
Вручную |
|
|
1.5 |
Выполнить "n"
расчетов рамы на воздействие единичных сил |
|
Intab13 [2] |
STARK_ES [9] |
|
1.6 |
Распечатать результаты (таблицы перемещений и усилий) |
|
Intab13 |
STARK_ES |
|
1.7 |
Распечатать
в масштабе деформированные схемы рамы |
|
Intab13 |
STARK_ES |
|
1.8 |
Распечатать
в масштабе единичные эпюры моментов |
|
Intab13 |
STARK_ES |
|
1.9 |
Нанести числовые значения на деформированные схемы |
|
Вручную |
Вручную |
|
1.10 |
Нанести числовые значения на единичные эпюры моментов |
|
Вручную |
STARK_ES |
|
1.11 |
Сформировать матрицу податливости А и проверить ее симметрию |
А= |
Вручную |
Вручную |
|
2 |
Определение частот и формы собственных колебаний |
|||
|
2.1 |
Ввести число динамических степеней свободы "n", вектор масс М, матрицу внешней податливости А. |
|
SERVIK [8] |
MathCAD [9] |
|
2.2 |
Получить матрицу внешней жесткости рамы R обращением матрицы податливости А. |
R = А-1 |
SERVIK |
MathCAD |
|
2.3 |
Получить несимметричную матрицу динамической податливости С |
С=А·М |
SERVIK |
MathCAD |
|
2.4 |
Решить несимметричную проблему собственных значений. |
|
- |
MathCAD |
|
2.5 |
Произвести симметризацию матрицы динамической податливости C* |
C*=М1/2·А· М1/2
|
SERVIK |
- |
|
2.6 |
Решить на ЭВМ симметричную проблему собственных значений, |
|
SERVIK |
- |
|
2.7 |
Вывести
на печать собственные значения λk и вектора |
|
SERVIK |
MathCAD |
|
2.8 |
Изобразить спектральные шкалы частот собственных колебаний ωk, fk, периодов Тк. |
|
||
|
2.9 |
Перейти
к исходному базису собственных векторов |
|
SERVIK |
- |
|
2.10 |
Произвести
нормировку собственных векторов |
|
SERVIK |
MathCAD |
|
2.11 |
Сформировать вектора инерционных сил |
|
вручную |
MathCAD
|
|
2.12 |
Распечатать деформированные схемы рамы от статических сил инерции – формы колебаний |
|
Intab13 |
STARK_ES |
|
2.13 |
Распечатать таблицу перемещений |
|
Intab13 |
STARK_ES |
|
2.14 |
Нанести числовые значения на деф. схемы – формы колебаний |
|
Вручную |
Вручную |
|
2.15 |
Проверить ортогональность двух любых форм
колебаний |
|
Вручную |
Вручную |
|
3 |
Расчет на вынужденные колебания методом разложения по формам колебаний |
|||
|
3.1 |
Найти
обобщенные массы Мk, для каждой формы колебаний |
|
SERVIK |
MathCAD |
|
3.2 |
Найти
обобщенные силы Qk(t) для каждой формы колебаний |
|
SERVIK |
MathCAD |
|
3.3 |
Записать уравнения движения для каждой частоты собственных колебаний ωk в обобщенных координатах qк без демпфирования |
|
SERVIK |
MathCAD |
|
3.4 |
Выбрать активную степень свободы, по которой задана динамическая нагрузка Р1 на динамической модели рамы |
|
Вручную |
Вручную |
|
3.5а |
Решить численно с помощью интеграла Дюамеля уравнения движения и найти обобщенные координаты qk(t) для P(t) = Ро = const |
P(t) = Ро = const |
SERVIK |
- |
|
3.5б |
Решить численно с помощью аналитических формул уравнения движения и найти обобщенные координаты qk(t) для P(t) = Ро = const |
P(t) = Ро = const |
- |
MathCAD |
|
3.6 |
Получить
численно компоненты вектора динамических перемещений |
|
SERVIK |
MathCAD |
|
3.7 |
Изобразить
осциллограммы zi(t) для компонент вектора динамических перемещений |
|
SERVIK |
MathCAD |
|
3.8 |
Получить численно вектор упругих сил |
|
SERVIK |
MathCAD |
|
3.9 |
Изобразить
осциллограмму si(t) для активной компоненты вектора |
|
SERVIK |
MathCAD |
|
3.10 |
Установление параметров пика – максимального значения активной компоненты вектора упругих сил (si)max и момента времени tпик. |
|
SERVIK |
MathCAD |
|
3.11 |
Загрузить раму по направлению всех динамических
степеней свободы элементами вектора упругих сил |
|
Intab13 |
STARK_ES |
|
3.12 |
Загрузить раму статической силой Ро и построить эпюру статических изгибающих моментов Мст. |
|
Intab13 |
STARK_ES |
|
3.13 |
Найти динамический коэффициент μ в опасных сечениях рамы |
μ=Мдин/Мст < 2 |
Вручную |
Вручную |
|
4 |
Сравнительный контроль частот и форм собственных колебаний прямым динамическим расчетом рамы по МКЭ |
|||
|
4.1 |
Сформировать дискретную систему для плоской рамы с номерами узлов, стержней, динамической нагрузкой, закреплениями, осями координат и размерами. |
|
STARK_ES |
|
|
4.2 |
Сформировать динамическую модель рамы с точечными массами |
|
STARK_ES |
|
|
4.3 |
Выполнить расчет плоской рамы на собственные колебания по МКЭ |
|
STARK_ES |
|
|
4.4 |
Распечатать спектры собственных значений, собственных векторов, частот и периодов колебаний |
|
STARK_ES |
|
|
4.5 |
Распечатать в масштабе формы колебаний, нанести на них значения перемещений. |
|
STARK_ES |
|
|
4.5 |
Сравнить компоненты спектров частот и форм колебаний МКЭ с расчетом по программам SERVIK или MathCAD |
|
STARK_ES |
|


Литература
1 Строительная механика: Динамика и устойчивость сооружений: Учеб. для строит. спец. вузов / А.Ф.Смирнов [и др.] ; Под ред. Смирнова А.Ф. - М.: Стройиздат, 1984. - 415 с.
2 Дарков, А.В. Строительная механика: учеб. для строит. специальностей вузов / А.В.Дарков, Н.Н.Шапошников. - 9-е изд., испр. - СПб. : Лань, 2004. - 655 с. (1986г.-607 с.)
3 Александров, А.В. Сопротивление материалов. Основы теории упругости и пластичности: Учеб. для строит. специальностей вузов / А.В.Александров, В.Д.Потапов. - 2-е изд., испр. - М.: Высш. шк., 2002.- 399 с.
4 Сенющенков, М.А. Основы устойчивости и динамики сооружений. Учебное пособие для студентов строительных специальностей. – Брянск: РИО БГИТА, 2010. -223с.
5 Сенющенков, М.А. Строительная механика. Динамика и устойчивость сооружений (спецкурс): Методические указания к выполнению РПР №1 "Расчет плоской статически неопределимой рамы с центрально сжатыми стойками на устойчивость методом перемещений" для студентов строительного факультета/ М.А. Сенющенков, С.Н. Швачко. - Брянск, БГИТА, 2009. - 38 с.
6 Швачко, С.Н. Методические указания к практическим и лабораторным занятиям "Расчет плоской рамы с центрально сжатыми стойками на устойчивость в ПК STARK_ES " для студентов строительных специальностей. -Брянск, БГИТА, 2009 - 7с.
7 Сенющенков, М.А. Строительная механика. Динамика и устойчивость сооружений (спецкурс). Методические указания к выполнению РПР №2 "Динамический расчет многомассовой стержневой системы на собственные и вынужденные колебания" для студентов строительного факультета. -Брянск, БГИТА, 2009 - 88с.
8 Сенющенков, М.А. Использование диалоговой программы интегрирования уравнений движения SERVIK97 в курсе динамики сооружений/ Новые информационные технологии в образовании. -Брянск, БГТУ, 1998. -С.81.
9 Швачко, С.Н. Методические указания к выполнению расчетно-проектировочной работы "Динамический расчет многомассовой стержневой системы с использованием ПК STARK_ES и MathCAD" для студентов дневного обучения строительного факультета. –Брянск: БГИТА, 2010 - 22с.
10 СНиП 2-23-81*. Стальные конструкции. – М.: ГУП ЦПП, 1998. – 96с.
11 СНиП 2.01.07-85*. Нагрузки и воздействия. – М.: ГУП ЦПП, 2001.
12 СНиП 2-7-81* Строительство в сейсмических районах/ Госстрой СССР. – М: АПП ЦИТП, 1991 – 50с.
13 Бате, К.Ю. Численные методы анализа и метод конечных элементов./ К.Ю.Бате, Эд. Вильсон. -М.: Стройиздат, 1982. – 447с.
14 Уилкинсон, Райнш. Справочник алгоритмов на языке АЛГОЛ. Линейная алгебра. – М.: Машиностроение, 1976.
15 Чернов, Ю.Т. Прикладные методы динамики сооружений (Метод "нормальных форм" и его приложения): Учеб. пособие для вузов по направлению "Стр-во" / Ю.Т.Чернов. - М.: Изд-во АСВ, 2001. - 77с.
16 Коробко, В.И. Строительная механика: Динамика и устойчивость стержневых систем: Учебник / Под ред. В.И.Коробко. – М.: Изд-во АСВ, 2008. – 400с.
17 Даниелов, Э.Р. Устойчивость и колебания плоских рам: программно-методическое обеспечение по курсу "Устойчивость и динамика сооружений": учеб. пособие для вузов по направлению подгот. дипломир. специалистов "Стр-во" / Э.Р.Даниелов. - М.: Изд-во АСВ, 2004. - 160с.