Математическая модель процесса качения пневматического колеса по деформируемому грунту
Лазарев В.В. (БГИТА, г. Брянск, РФ)
The mathematical model for calculation by a method is developed iterations on the COMPUTER of process swing a pneumatic wheel. On a deformable ground, using for this purpose known. Dependences between loading on a ground and his deformation.
Для современного состояния теории качения колеса по деформируемому грунту характерно наличие значительного числа методических подходов к решению задач связанных с процессом взаимодействия колесного движителя с грунтом. Сложность рассматриваемого процесса из-за неоднородности и нестабильности параметров грунта обуславливает приближенность любых аналитических решений. В этой связи в данном случае более целесообразно применение метода абстрагирования, чем применение строгих теоретических обоснований. Такой подход обеспечивает возможность для определения параметров контакта колес с грунтом использовать известные математические зависимости, дающие результаты расчета, как это отмечается в работе [1], достаточно близкие к действительности.
Расчетная схема процесса взаимодействия колеса с грунтом, в которой, как это предложено целым рядом исследователей выделяются две характерные зоны контакта колеса с грунтом – плоские и кривошипные (рисунок 1).
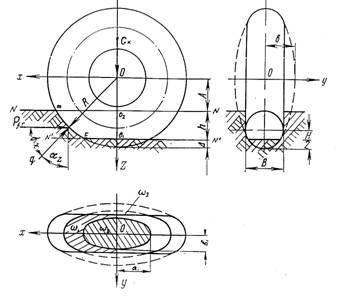
Рисунок 1 – Расчетная схема процесса взаимодействия пневматического колеса с грунтом
При этом приняты следующие допущения.
1) Площадь Sпл плоской зоны контакта колеса с грунтом представлена в
виде эллипса с полуосями «![]() » и
» и ![]() (см. рисунок 1). Из треугольников AOB и
(см. рисунок 1). Из треугольников AOB и ![]() следует
следует ![]() ,
, ![]() , где R-
свободный радиус колеса; Rпр - радиус протектора
шины; ∆- радиальная деформация шины в плоской зоне контакта колеса с грунтом.
, где R-
свободный радиус колеса; Rпр - радиус протектора
шины; ∆- радиальная деформация шины в плоской зоне контакта колеса с грунтом.
Поскольку для реальных соотношений величин ![]() , Rпр и ∆ у
существующих шин произведение 2Rпр∆, а тем более 2R∆>>∆
2, то с погрешностью расчета не более 1-2% величину ∆ 2
из под знака радикала можно исключить, что позволяет значительно упростить вывод
расчетных зависимостей. При этом рассматриваются два случая.
, Rпр и ∆ у
существующих шин произведение 2Rпр∆, а тем более 2R∆>>∆
2, то с погрешностью расчета не более 1-2% величину ∆ 2
из под знака радикала можно исключить, что позволяет значительно упростить вывод
расчетных зависимостей. При этом рассматриваются два случая.
а) Случай А, когда прогиб ∆ шины не превышает
максимальный прогиб ее протектора ( ). В этом случае
). В этом случае ![]() .
.
б) Случай Б, когда прогиб ![]() . В этом случае принимается,
что
. В этом случае принимается,
что ![]() ширина
плоской зоны имеет предельную величину равную ширине
ширина
плоской зоны имеет предельную величину равную ширине ![]() протектора.
протектора.
2) Геометрическую форму и размеры площади Sкр проекции
криволинейной зоны контакта колеса с грунтом на горизонтальную плоскость N-N представим в
виде полуразности площади эллипса с полуосями Lк и ![]() , где bк - ширина контакта колеса с грунтом на поверхности
колеи и площади эллипса плоской зоны контакта (см. рисунок 1).
, где bк - ширина контакта колеса с грунтом на поверхности
колеи и площади эллипса плоской зоны контакта (см. рисунок 1).
Для определения bк воспользуемся зависимостью полученной Я.С. Агейкиным на основе обработки экспериментальных данных [2].
 , (1)
, (1)
где В и Н – соответственно ширина и глубина профиля шины; h – глубина колеи.
3) Среднее давление qкр в
криволинейной зоне контакта колеса с грунтом, как это предложено в работе [1],
принимается равным среднему давлению q
в плоской зоне, соответствующему
глубине погружения колеса на ![]() .
.
4) Условно принимается, что плоская зона контакта колеса с грунтом по отношению к колесу является твердой опорной поверхностью. При таком допущении значение ∆, на основании зависимости для определения радиуса качения пневматического колеса по твердой опорной поверхности, представим в следующем виде
 , (2)
, (2)
где
![]() - константа
шины, отражающая влияние ее конструктивных параметров на величину ∆;
- константа
шины, отражающая влияние ее конструктивных параметров на величину ∆; ![]() - нормальная
нагрузка на плоскую зону контакта колеса с грунтом;
- нормальная
нагрузка на плоскую зону контакта колеса с грунтом; ![]() - атмосферное давление;
- атмосферное давление; ![]() - избыточное давление
воздуха в шине.
- избыточное давление
воздуха в шине.
5) Форму и размеры площади проекции криволинейной зоны
контакта колеса с грунтом на плоскость ZOY, величиной
которой необходимо располагать при определении силы ![]() сопротивления грунта качению
колеса, представлены в виде прямоугольника с высотой равной глубине колеи и
шириной b [1].
сопротивления грунта качению
колеса, представлены в виде прямоугольника с высотой равной глубине колеи и
шириной b [1].
![]() (3)
(3)
В соответствии с принятыми допущениями нормальные нагрузки на плоскую зону Gпл и криволинейную Gкр зоны контакта колеса с грунтом можно представить в следующем виде.
Для
случая А: ![]() ; (4)
; (4)
 . (5)
. (5)
Для
случая Б:  ; (6)
; (6)
 , (7)
, (7)
где
![]() - длина
полухорды окружности с радиусом R.
- длина
полухорды окружности с радиусом R.
Решая зависимости (4) и (6) совместно с зависимостью (2) после преобразований получим:
-
для случая А:  ; (8)
; (8)
- для случая Б:  (9)
(9)
На
основании полученных выше результатов уравнения равновесия вертикальных сил,
действующих на колесо при его качении по грунту без учета силы ![]() , можно представить в
следующем виде:
, можно представить в
следующем виде:
-
для случая А  (10)
(10)
-
для случая Б  ,
(11)
,
(11)
где
![]() ;
;  .
.
Каждое из уравнений (9) и (10) содержит четыре неизвестных: ∆, q, qкр и h. Поскольку их значения взаимосвязаны, то решения этих уравнений можно выполнить, используя метод итерации (приближения) с помощью ЭВМ.
Для достижения этой цели, задавшись шагом счета глубины h колеи, приняв, например, ∆h= 0,001 м, каждый цикл счета на ЭВМ следует выполнять в следующей последовательности:
1)
![]() .
.
2)
![]() . Если
. Если  , то значения ∆
определяется по зависимости (8), если иначе, то по зависимости (9).
, то значения ∆
определяется по зависимости (8), если иначе, то по зависимости (9).
3)
![]() .
.
4)
![]() .
.
5)
 , если
, если ![]() . Если иначе, то
. Если иначе, то  .
.
6)
![]() .
.
7)
![]() .
.
8)
![]() , если
, если ![]() , иначе
, иначе
9)
![]() .
.
10)
 .
.
11)
![]() .
.
12)
![]() .
.
13)
![]() .
.
Расчет проводится до тех пор, пока не будет соблюдаться следующее равенство
![]() , (14)
, (14)
где ![]() - величина нормальной нагрузки
приходящейся на плоскую зону контакта колеса с грунтом, соответствующая
принятому шагу счета
- величина нормальной нагрузки
приходящейся на плоскую зону контакта колеса с грунтом, соответствующая
принятому шагу счета ![]() .
.
Выполнение этого равенства свидетельствует о справедливости результатов, полученных в последнем цикле счета.
Предлагаемая методика расчета позволяет для определения параметров качения пневматического колеса по грунту использовать практически любую известную зависимость между нагрузкой и нормальной осадкой грунта.
Воспользуемся, например, для этой цели весьма распространенной степенной зависимостью Винклара-Гесретерна-Бернштейна
![]() ,
(15)
,
(15)
где с и μ – параметры грунта.
Представим зависимость (15) в следующем виде
 ,
,
где h0 – базовая деформация грунта.
Если принять, что h0 = 0,01 м, то такое представление зависимости (15) позволяет при расчетах в системе СИ использовать имеющиеся экспериментальные данные с и μ справедливые при размерности q равной кгм/см2.
При этом можно записать
 , м.
(16)
, м.
(16)
В соответствие с принятой расчетной схемой зависимость для определения силы сопротивления грунта представим в следующем виде
 , (17)
, (17)
где Syoz – симметричная половина площади лобового сопротивления качению колеса по грунту; qкр = qζz - давление колеса на грунт в криволинейной зоне контакта колеса с грунтом.
Имея в виду, что в данном случае
 ,
,
после преобразований зависимости (17) приходим к следующему результату
 .
(19)
.
(19)
В качестве следующего примера для определения величин h, Pf и значения ζz воспользуемся зависимостью профессора В.В. Кацыгина между нормальным напряжением σ и деформацией грунта, представленной в виде функции гиперболического тангенса [2]
 ,
(20)
,
(20)
где σ0 - предел прочности грунта; к0 – коэффициент объемного смятия грунта.
После ряда преобразований зависимости (20) автором настоящей работы получены следующие формулы:
 ;
(21)
;
(21)
 ; (22)
; (22)
 , (23)
, (23)
где ![]() ,
, ![]() .
.
Литература
1. Агейкин Я.С. Проходимость автомобилей/ Я.С.Агейкин. – М.: Машиностроение, 1981. – 232 с.
2. Тракторы: теория. Учебник для студентов вузов по спец. «Автомобили и тракторы» / В.В.Гуськов, Н.Н. Веляев, Ю.Е. Атаманов и др. Под общ. ред В.В.Гуськова. – М.: Машиностроение, 1988. – 376 с.