ВЛИЯНИЕ ИЗМЕНЕНИЯ ЖЕСТКОСТИ ДЕМПФИРУЮЩИХ ЭЛЕМЕНТОВ В СИСТЕМЕ – МАНИПУЛЯТОР И СИЛОВОЙ ПРИВОД НА БАЗЕ МЕТАЛЛОВ С ЭФФЕКТОМ ПАМЯТИ ФОРМЫ
Коновалов М.Н., Дроздовский Г.П. (УГТУ, г. Ухта, РФ)
Use of materials with effect of memory of the form in hydrocylinders of systems of a hydrodrive of wood machines and research of influence of rigidity demfer of elements in a drive of the manipulator with electricboster for increase demferous.
В процессе демпфирования затухающих колебаний манипулятора особое влияние оказывает жесткость демпфера. Ранее в [1] рассматривались моделируемые структуры манипулятора с различными демпфирующими элементами (система 1 - жёсткий стержень, имитирующий силовой привод на базе материала с эффектом памяти формы (ЭПФ) и демпфирующий элемент (четвертная рессора); система 2 - гидроцилиндр и резиновый шланг (РВД)).
При анализе системы 1 варьировалась жесткость рессоры cр за счет количества ее листов n (n– 4; 5; 6; 7 листов) при вертикальной нагрузке Рр на консольный конец рессоры (таблица 1).
Таблица 1 – Значения жесткости рессоры cр (кН/м)
|
Рр, Н |
n |
|||
|
4 |
5 |
6 |
7 |
|
|
522,64 |
47,51 |
55,01 |
61,50 |
74,66 |
|
716,11 |
51,15 |
57,30 |
62,30 |
75,3 |
|
909,6 |
51,97 |
58,68 |
64,97 |
75,8 |
|
1103 |
53,80 |
59,62 |
66,84 |
76,06 |
По экспериментальным данным таблицы 1 построены зависимости изменения жесткости cр при варьировании количества листов n и вертикальной нагрузки Рр на консольный конец рессоры для системы 1 (рис. 1).
Сравнительный анализ процессов затухания колебаний манипулятора
(в проведенном экспериментальном исследовании) по логарифмическому декременту
затухания колебаний δ1 и по критерию Кδ=![]() ,
позволяет определить степень эффективности гашения колебаний систем 1 и 2. Система 1 эффективней системы 2 при более
жесткой рессоре (n≥ 6), т. е при Кδ >1, но
менее эффективна при n≤5, когда Кδ <1 (рис.
2). Таким образом установлено, что демпфирующий элемент – рессора (система 1)
эффективней системы 2 при увеличении жесткости рессоры cр и снижении нагрузки Рр.
,
позволяет определить степень эффективности гашения колебаний систем 1 и 2. Система 1 эффективней системы 2 при более
жесткой рессоре (n≥ 6), т. е при Кδ >1, но
менее эффективна при n≤5, когда Кδ <1 (рис.
2). Таким образом установлено, что демпфирующий элемент – рессора (система 1)
эффективней системы 2 при увеличении жесткости рессоры cр и снижении нагрузки Рр.
Поэтому, для выполнения требуемого условия Кδ >1 необходима управляемая корректировка жесткости пакета рессор, особенно при увеличении нагрузки на манипулятор, т.к. в реальных условиях эксплуатации изменение числа листов рессоры не представляется возможным.
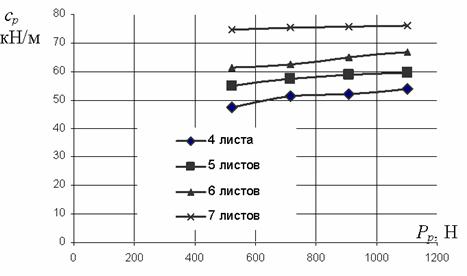
Рисунок 1 – Изменение жесткости рессоры cр =f(n; Рр)

Рисунок 2 – Эффективность гашения колебаний сравниваемых вариантов (с учетом идентичной жесткости)
Предлагается способ изменения жесткости рессоры в процессе работы (система 1) при ограниченном количестве листов. Это возможно при изменении рабочей длины рессоры l за счет введения, регулируемого по выдвижению, жесткого упора в виде электробустера (например МП-100) (рис. 3). Применение электробустера для идентичности управления электроприводом гидроцилиндра с ЭПФ, позволит изменять величину ∆ при его выдвижении, что позволяет варьировать жесткость пакета рессор (изменяется рабочая длина рессоры l∆=l-∆).
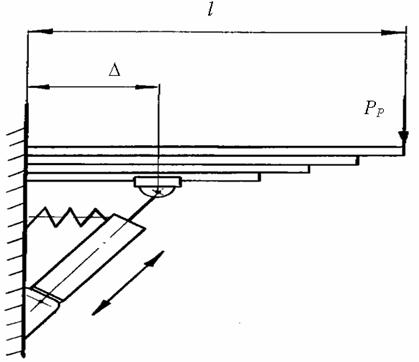
Рисунок 3 – Схема регулировки жесткости рессоры для системы 1 с применением электробустера на скользящей опоре
Жёсткость для четвертной эллиптической рессоры определяется по формуле [2]
![]() ,
(1)
,
(1)
где ![]() - модуль
упругости при изгибе, Па;
- модуль
упругости при изгибе, Па;![]() - момент инерции листа рессоры,
м4;
- момент инерции листа рессоры,
м4;![]() - число листов рессоры;
- число листов рессоры;![]() - длина
корневого листа рессоры, м (или рабочая длина рессоры).
- длина
корневого листа рессоры, м (или рабочая длина рессоры).
По формуле 1 подсчитаны жесткости рессоры от варьировки ∆ для новой рабочей длины l∆ и сведены в таблицу 2.
Таблица 2 – Жесткости рессоры cр (кН/м) от варьирования величины ∆ (м)
|
∆l, м |
n |
|||
|
4 |
5 |
6 |
7 |
|
|
∆l1=0,19 при ∆=0 |
53,8 |
59,62 |
66,84 |
76,06 |
|
∆l2=0,18 при ∆=0,01 |
70,0 |
78,4 |
85,75 |
92,4 |
|
∆l3=0,17 при ∆=0,02 |
83,09 |
93,07 |
101,8 |
109,7 |
|
∆l4=0,16 при ∆=0,03 |
99,66 |
111,62 |
122,1 |
131,55 |
Например, система корректировки жесткости рессоры при увеличении ∆ на 0,01 м позволяет повысить жесткость cр для n =5 на 31,5 %, а при ∆ на 0,02 м жесткость возрастает на 54,4 % для n = 4, что соответствует требуемому условию Кδ >1.
Система регулирования жесткости рессоры в системе 1 позволит осуществить автоматический режим корректировки жесткости всей упругой структуры манипулятора в зависимости от вылета манипулятора и изменения нагрузки на рабочий орган рукояти. В итоге образуется единая (вместе с гидроцилиндром на базе материалов с ЭПФ) оптимальная эргономическая система электроуправления манипулятора.
Литература
1. Коновалов М. Н. Экспериментальная установка и методика исследования динамического нагружения манипулятора ТБ-1 с применением силовых элементов на базе материалов с эффектом памяти формы. // Сборник научных трудов по итогам международной научно-технической конференции “Актуальные проблемы лесного комплекса” Выпуск 11:.– Брянск: БГИТА, 2005. – С. 78−82.
2. В.А. Александров. Моделирование технологических процессов лесных машин: Учебник для вузов.- М.:Экология, 1995.-256 с.