ИССЛЕДОВАНИЕ ПРОЦЕССОВ ВЗАИМОДЕЙСТВИЯ ЭЛЕМЕНТОВ КОЛЕСНО-ГУСЕНИЧНОЙ
ХОДОВОЙ СИСТЕМЫ
С ДЕФОРМИРУЕМОЙ ПОВЕРХНОСТЬЮ ПЕРЕМЕЩЕНИЯ
Дроздовский Г.П., Шоль Н.Р. (УГТУ, г. Ухта, РФ)
The comparative estimation by the offered new criterion of a level of ecological influence used wood caterpillar logging tractors on a deformable surface is lead. The prospect of performance of running systems of wood tractors is determined. The offered technique allows to estimate on a design stage of a running part a level of ecological influence of a caterpillar logging tractors on a deformable surface.
Современная тенденция совершенствования ходовых систем лесных трелевочных тракторов должна быть направлена в основном на выполнение требований экологии, тягово-сцепных свойств и повышения проходимости тракторов в бездорожных условиях применения, т.е. на лесосеке. Критерии оценки повышения указанных свойств тракторов разрабатываются теорией системы "местность-машина", направленной главным образом на решение экологических проблем промышленного вмешательства человека в экосреду. Разрушение опорного слоя с образованием глубокой колеи, уплотнение и эрозия почвы определяется в значительной степени конструкцией ходовой системы и параметрами технологического использования трелевочных тракторов.
Увеличение количества применяемых трелевочных тракторов с колесно-гусеничным движителем в определенной степени оправдано, т.к. они дешевле гусеничных, меньше по габаритам и весу, отличаются высокой маневренностью, удобством управления, более высокой плавностью хода.
В последнее время ряд фирм Швеции и Финляндии, выпускающих лесозаготовительную технику (форвардеры, харвестеры, процессоры и т.д.), стали применять новый тип ходовых систем – тандемные опорно-тяговые ходовые тележки, пневматические катки которых попарно снабжены гусеничными лентами. Подобную конструкцию ходовых систем развивает фирма "Тимберджек". Указанная тенденция поддерживается рядом фирм "Оsa", "Valmet" и развивается по двум направлениям:
- с приводом гусеничной цепи от ведущей звездочки (фирма Valmet) – в системе "Экотракт";
- с приводом гусеничной ленты от ведущих опорных пневматических шин катков (в основном фирмы "Тимберджек" и "Valmet").
Второе направление позволяет использовать ходовую часть как в колесном варианте, так и в гусеничном. Это представляет для нас наибольший интерес.
Процессы взаимодействия элементов такой ходовой системы осуществляются в двух параллельных алгоритмах:
- создание силы перематывания гусеничной ленты за счет взаимодействия опорных ведущих (приводных) колес – катков с гусеничной лентой без явных признаков зацепления с ней, кроме упругих сил трения (возможен специальный профиль шин, имитирующий цевочное зацепление колеса с гусеницей за счет поперечных грунтозацепов на профиле шины);
- создание силы тяги гусеничной ленты в зоне взаимодействия с деформируемой поверхностью за счет привода от опорных колес.
Такой последовательный и взаимозависимый характер взаимодействия элементов ходовой системы является малоизученным, поэтому осуществлена попытка теоретического осмысления происходящих процессов взаимодействия. При рассмотрении вопроса применена следующая последовательность:
- рассмотрены параметры движения и силовые факторы качения опорных ведущих шин-катков по твердой поверхности (по гусеничной ленте) с передачей силовых параметров по тяге – гусеничной ленте через зону упругого контакта катка с этой лентой;
- затем рассматриваются параметры взаимодействия гусеничной ленты с поверхностью (необходимая площадь опорной поверхности гусеничной ленты, оптимальная вертикальная нагрузка на тандем ходовой части, коэффициент сцепления с поверхностью);
В качестве опорных катков применим тороидальные шины с радиальной нагрузкой 24…40 кН.
При рассмотрении вопроса применена методика определения параметров взаимодействия шина - гусеничная лента (рис. 1) [1].
|
|
|
Рисунок 1 - Колесно-гусеничный движитель с одним ведущим опорным катком |
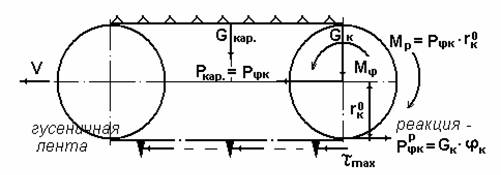
Сопротивление качению опорного ведущего катка по гусеничной ленте можно выразить [1]:

где ![]() – радиус
колеса (катка) в ведомом режиме, м;
– радиус
колеса (катка) в ведомом режиме, м;
![]() - крутящий
момент, подводимый к оси колеса, Н×м (Мкр
» Мj);
- крутящий
момент, подводимый к оси колеса, Н×м (Мкр
» Мj);
![]() - условно "динамический"
радиус катка в функции подводимого крутящего момента,
- условно "динамический"
радиус катка в функции подводимого крутящего момента, ![]() ;
;![]()
![]() -
вертикальная нагрузка на каток, Н;
-
вертикальная нагрузка на каток, Н;
![]() - коэффициент
сопротивления качению катка в ведомом режиме (
- коэффициент
сопротивления качению катка в ведомом режиме (![]() =0).
=0).
 ,
,
![]() (1)
(1)
где ![]() - давление
воздуха в шине катка (МПа);
- давление
воздуха в шине катка (МПа);
![]() МПа;
МПа; ![]() Н×м2.
Н×м2.
Радиус колеса (катка) в ведомом режиме определяется по формуле:
 ,
(2)
,
(2)
где ![]() - наружный радиус шины в состоянии, свободном от всех
видов нагрузки, м;
- наружный радиус шины в состоянии, свободном от всех
видов нагрузки, м;
r0 =0,574…0,641 м; a1 = (0,747…1,494)×103 Н-1; a2 = (0,917…1,883) ×103 Н-1.
 ,
(3)
,
(3)
где ![]() ,
, ![]() ,
, ![]() - паспортные
параметры шин катка.
- паспортные
параметры шин катка.
Радиус качения шины при буксовании ![]() (с учетом упрощений из-за малости значений
сомножителей):
(с учетом упрощений из-за малости значений
сомножителей):
![]() ,
,
где jк – коэффициент сцепления шины с гусеничной лентой.
Момент, реализуемый шиной при сцеплении с гусеничной лентой в начале буксования равен:
![]() .
.
Значение ![]() , деленное на радиус
катка
, деленное на радиус
катка ![]() определяет натяжение в
гусеничной ленте Т, т.е. тангенциальное воздействие ленты на поверхность.
определяет натяжение в
гусеничной ленте Т, т.е. тангенциальное воздействие ленты на поверхность.
Коэффициент сцепления ![]() ведущей опорной шины
катка с гусеничной ленты в начале возможного буксования определяется по
формуле:
ведущей опорной шины
катка с гусеничной ленты в начале возможного буксования определяется по
формуле:
 ,
,
или с незначительной погрешностью:
 .
(4)
.
(4)
Формула (4) соответствует началу процесса буксования колеса относительно гусеницы.
Согласно [2] коэффициент сцепления гусеницы с грунтом равен:
 .
(5)
.
(5)
где q - удельное давление гусеницы (КПа); С0 и tgq - параметры тангециального сопротивления почвы сдвигу.
Для определения необходимой площади F опорной поверхности гусеничной ленты колесно-гусеничной ходовой системы (тандема) рассмотрим систему с двумя ведущими опорными катками по борту. Рассматриваемая схема наиболее часто встречается для полной реализации сцепного веса, приходящегося на каретку тандема.
При рассмотрении вопроса могут иметь место следующие два соображения:
1. Если допустить возможность пробуксовывания ведущих
колес относительно гусеничной ленты, то надо принять ![]() .
.
Это экологически оправданный вариант, т. к. отсутствует повреждение поверхности от режима буксования гусеничной ленты. Однако, это приводит к снижению тяговых свойств и износу шины катка.
2. Если допустить возможность пробуксовки гусеничной
ленты относительно поверхности, то надо принять ![]() .
.
Это экологически неоправданный вариант, т.к. будет иметь место образования глубокой колеи и увеличение сопротивления движению ходовой системы.
Примем
равенство коэффициентов сцепления ![]() .
.
Определим потребную площадь опорной поверхности колесно-гусеничной ходовой системы из принятого условия:
 ,
,
где ![]() .
.
Преобразуя, получим:
 ,
,
или с учетом ![]() , а
для двух катков
, а
для двух катков ![]() , получим
, получим
 .
.
После преобразований получим:
 .
.
Учитывая формулу (3), получим:
 .
(6)
.
(6)
Пример определения необходимой площади гусеничных лент двух колесно-гусеничных тандемов по борту машины с одной ведущей шиной в тандеме.
В качестве опорных катков применены обычные
тороидальные шины 14,00–20,00 (370 - 508 мм) при нагрузке на каждую шину 22,50 кН; внутреннем давлении воздуха ![]() ; радиус шины
; радиус шины ![]() м;
коэффициенте сцепления шин с гусеничной лентой, равном коэффициенту сцепления
гусеничной ленты с почвой (заболоченным лугом, торфом)
м;
коэффициенте сцепления шин с гусеничной лентой, равном коэффициенту сцепления
гусеничной ленты с почвой (заболоченным лугом, торфом) ![]() ; f0 = 0,01806;
; f0 = 0,01806;
С0 = 20 кПа; tgq =0,105.
 =1,287 м2
=1,287 м2
Общее давление трактора на поверхность при GS = 90 кН и количестве тандемов – 4 на оба борта (8 шин) равно:
![]() кПа.
кПа.
Ширина
гусеничной ленты b равна ![]() , где B
= 0,37 м – ширина шины;
, где B
= 0,37 м – ширина шины; ![]() = 0,025 (м) - ширина
ограничителя шины на ленте; b = 0,37
+ 2×0,025 = =0,42 м.
= 0,025 (м) - ширина
ограничителя шины на ленте; b = 0,37
+ 2×0,025 = =0,42 м.
Суммарная
длина опорной поверхности гусеничной ленты по борту ![]() м, а параметр
деформатора
м, а параметр
деформатора ![]() .
.
При двух тандемах на борт (4 шины) на каждый тандем приходится длина опорной поверхности гусеничных лент по 1,53 м. Для справки: длина опорной поверхности гусеницы по каждому борту тракторов – ТТ-4М равна 3,0 м; ТЛТ-100 – 3,2 м.
Литература
1. Петрушов В.А. и др. Сопротивление качению автомобилей и автопоездов. - М.: Машиностроение, 1975.- 221с.
2. Анисимов Г.М. и др. Лесные машины: Учебник. - М.: Лесная промышленность, 1980. - 511с.